cameras¶
This module provides different camera models.
Pinhole camera model¶
A camera could be approximated by a projective model, often called pinhole projection. The simplest representation of a camera is a light sensible surface (sensor): an image plane, a lens (projective projection) at a given position and orientation in space.
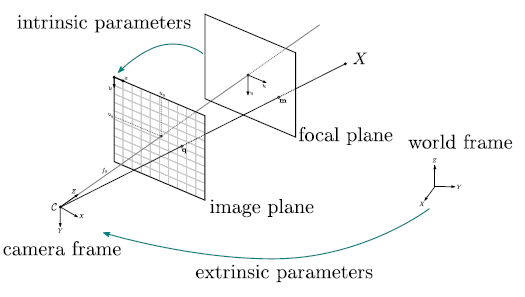
The pinhole camera model. An oriented central projective camera.
The pinhole camera geometry models the projective camera with two sub-parametrizations, intrinsic and extrinsic parameters. Intrinsic parameters model the optic component (without distortion) and extrinsic model the camera position and orientation in space. This projection of the camera is described as:
- Intrinsic parameters \([f; cu; cv]:\)
- \(ku, kv :\) scale factor relating pixels to distance (often equal to 1),
- \(f :\) the focal distance (distance between focal and image plane),
- \(cu, cv :\) the principal point, which would be ideally in the centre of the image.
- Extrinsic parameters \([R|t] = [R| - RC]:\)
- \(R :\) the rotation of the camera to the world frame,
- \(t :\) the translation of the camera. t is not the position of the camera. It is the position of the origin of the world coordinate system expressed in coordinates of the camera-centred coordinate system. The position, \(C\), of the camera expressed in world coordinates is \(C=-R^{-1} t = -R^T t\) (since R is a rotation matrix).
A 3D point is projected in a image with the following formula (homogeneous coordinates):
OpenMVG Pinhole camera models¶
- Pinhole intrinsic
Pinhole_Intrinsic : public IntrinsicBase- classic pinhole camera (Focal + principal point and image size).
Pinhole_Intrinsic_Radial_K1 : public Pinhole_Intrinsic- classic pinhole camera (Focal + principal point and image size) + radial distortion defined by one factor.
- can add and remove distortion
Pinhole_Intrinsic_Radial_K3 : public Pinhole_Intrinsic- classic pinhole camera (Focal + principal point and image size) + radial distortion by three factors.
- can add and remove distortion
Pinhole_Intrinsic_Brown_T2 : public Pinhole_Intrinsic- classic pinhole camera (Focal + principal point and image size) + radial distortion by three factors + tangential distortion by two factors.
- can add and remove distortion
Pinhole_Intrinsic_Fisheye : public Pinhole_Intrinsic- classic pinhole camera (Focal + principal point and image size) + fish-eye distortion by four factors.
- can add and remove distortion
- Simple pinhole camera models (intrinsic + extrinsic(pose))
// Setup a simple pinhole camera at origin
// Pinhole camera P = K[R|t], t = -RC
Mat3 K;
K << 1000, 0, 500,
0, 1000, 500,
0, 0, 1;
PinholeCamera cam(K, Mat3::Identity(), Vec3::Zero());